
Power Management System
For efficient power system management, we have opted for the following configuration:Battery Configuration
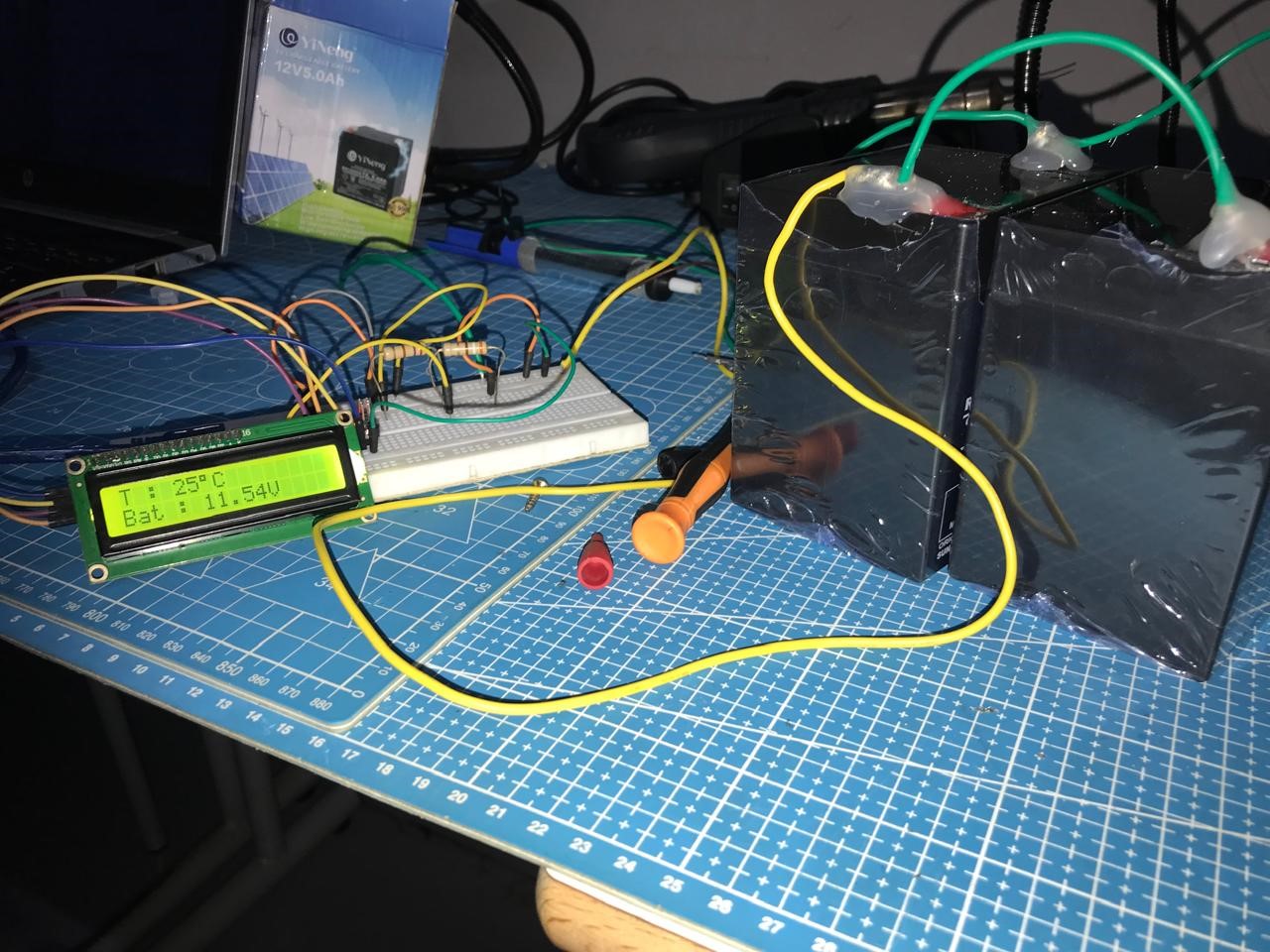
The rover’s power supply consists of two parallel-connected 12-volt batteries, each rated at 5 Ah.
Power Monitoring
An Arduino Nano manages the power supply, displaying the temperature via an LM35 sensor and battery charge level on an I2C LCD screen.
Emergency Stop
An emergency stop button is integrated to shut down the entire system if necessary.
Autonomy
With the current power supply, we have a capacity of 10 Ah, offering a maximum autonomy of 5 hours at a consumption of 2A.
Additional Factors:
The autonomy may be reduced by factors such as variations in component consumption, circuit losses, and temperature fluctuations.Command System
To control the actuators such as the 5 servo motors, 6 continuous motors, and stepper motors, we used an Arduino Mega.Servo Motors
The servomotors from REV ROBOTICS are supplied with 12V and require a maximum dropout current of 2A. TIP122 transistors amplify the 20 mA supplied by the Arduino Mega.
Noise Reduction
Capacitors are added to filter the noise produced by motors powered through their drivers by 12V.